2. Начало.
Наверное, нет непонимания
этого. Наверное, нельзя представить (отсюда!) что-то ещё. Тот, кто это
придумал, задачу решал методом "в лоб": если сдвигать колесо вдоль
горизонтальной оси, можно менять соотношение диаметров соприкосновения
и, тем самым, получить (создать) вариатор передаточного отношения. А то,
что оно в диапазоне (и в одной ступени) останется малым, никаких волнений
не вызывало - задача-то была решена.
Роль вариатора была осуществлена,
а роль самого редуктора выполняли другие узлы и элементы. Вероятно, думалось,
что в механике другого не может быть - отсюда и отношение к ней, на грани
полного бездумья (безъумья). Она же молча по этому поводу и незаметно смеялась
(рис.1).
На поверхности и
на виду было, и всем было видно, что зацепление внешнее, простое, одноступенчатое,
фрикционное, вариаторное, с малыми возможностями (потому что никуда не
денешься), и поэтому почти никому не нужное.
Вот если бы внутреннее,
то да, может быть, там, из-за сложности, и можно что-то получить, но и
там - тоже почти ничего (поэтому была попытка создания планетарных). И
все передачи (чуть ли не классически!) в одной ступени имели "пшик". И
более того, увидели, рассмотрев приведенные моменты инерции, что в редукторах
нужно дробить и дробить передачи в ступенях (и по определенной формуле
- если очень нужно), иначе приведенная инерционность вырастает так, что
становится весьма трудно, особенно при попытке добиться быстродействия,
например, в следящих системах. Так-таки формула минимального момента инерции
вращающихся масс в зависимости от числа ступеней и передаточного отношения
в них всё-таки была получена. Вот так!
Всё это вместе взятое
могло
показаться достаточно сложным (лучше бросить!) на пути науки и техники,
но искусство расчётчиков и конструкторов, студентов и ученых, деятелей
теории машин (о других лучше не говорить) старалось умно преодолеть возникающие
препятствия.
И всё потому, что схема
диск - колесо, установленные друг на друге, несмотря на массированный
натиск, не трансформировалась ни во что другое. Боролись за усовершенствование
деталей (и сейчас это модно). Мысленный тупик или, может быть, относительно
латинского - нонсенс. Чтобы это лучше понять, вглядитесь в схему этого
маленького
крокодила.
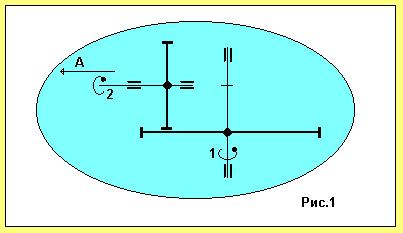
Может показаться, что "он" на уровне начала каменного века (и никогда
исторически не изменялся). Там обозначено: 1 - вертикальная ось
диска и диск, 2 - горизонтальная ось колеса и колесо, опирающееся на диск,
А - стрелка направлений возможных перемещений колеса вдоль оси 2.
3. Продолжение.
Итак, рассматриваем "маленького
крокодила" по-новому. Предварительно "держим в голове", что
нам нужно - это получить передачу с заданной разницей в диаметрах или в
числах зубьев во взаимодействующих контактных профилях. Во внутреннем зацеплении
это получается само собой, если приблизить размеры соприкасающихся колес
друг к другу, а кинематику представить особым образом, как это было ранее
показано в предыдущих выпусках. Во внешнем - чувствуете!?-мы вошли в ТММ
или в рассказ о ней, что одинаково все равно, - нужно наоборот:
такие
разницы в диаметрах, чтобы они существенно отличались. По возможностям
и габаритам - это "ни в какие ворота". Соотношение диаметров может быть
и будет близко к нулю и бесконечности.
Но в этом "маленьком крокодиле"
видим, что это и не надо. Во внешнем зацеплении (если особо не зацикливаться)
можно получить передачу и необходимую разность диаметров искусственно -
это, если колесо относительно диска не только крутится, но и двигается
по какой-то траектории. Заранее можно сказать, что общий вид траекторных
принципов отображен в самом конце - на рис.5. Общий принцип передач (и
многого другого) - это не только вращение, но и движение. Что и давало
раньше получение положительного эффекта.
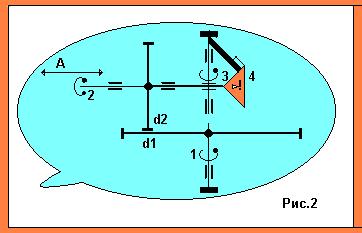
Если отпустить ось колеса, дать ей возможность движения, её привод получит нагрузку, пришедшую от диска, и её ось реактивно начнет движение. Здесь пора показать "измененного маленького крокодила", обозначенного на рис.2. Смотрим и понимаем! Sapienti Sat! Там всё осталось на своих местах и в тех же обозначениях, а именно: 1 - ось вращения диска, 2 - ось вращения колеса, А - стрелка возможных перемещений вдоль оси 2. Добавлено и изменено: ось 1 разбита на две части, нижняя часть оставлена ей самой и диску, в верхнюю, обозначенную как 3, вошла ось 2 и шарнирно в ней укрепилась. К оси 3 присоединен привод 4. Получилась новая схема, отличная от "предка" по рис.1, которая, в частности, может работать по-старому, однако, она получила и новые возможности.
Линия осей 1 и 3 (и их элементов)
может служить в качестве особого
передающего вала,
несущего нагрузку, вращающегося как одно целое при условии, что колесо
оси 2 неподвижно. Если при этом привод 4 начинает действовать, он разрывает
передачу нагрузки по валу, вносит дополнительное вращение и дополнительное
действие, получаемые от привода и от колеса на оси 2.
Здесь можно представить,
что работают одновременно две схемы: по рис.1 и по рис.2.
Относительно рис.2 - это, в частности, передающий вал, по рис.1 - это возможность
изменения положения колеса в направлении стрелки А. Передающий вал вращения
не передает в каком бы положении ни находилось колесо 2, если не действует
привод 4. Потому что в этом случае колесо только обкатывается по диску
и в точке контакта с ним не создает никакого усилия.
Включение привода 4 приводит
к передаче вращения от оси 3 к оси 1. Процесс передачи следующий.
Представим, что относительно оси 2 имеется некоторый нагрузочный момент.
Диаметр d2 колеса на оси 2 равен диаметру d1 диска в точке контакта. При
действии привода 4 колесо на оси 2 начнет обкатываться по диску. При этом
ось 3 получает вращение вместе с движением и вращением оси 2. Эффект такой,
что на линии осей 3 и 1 ось 3 вращается, а ось 1 не вращается (вал 3-1
разорван), однако, по диску оси 1 обкатывается колесо оси 2, вместе с тем
оно вращается вокруг оси 2.
Здесь неожиданно наступают следующие интересные моменты. Они кратко такие:
4. Усовершенствования.
Это действительно только
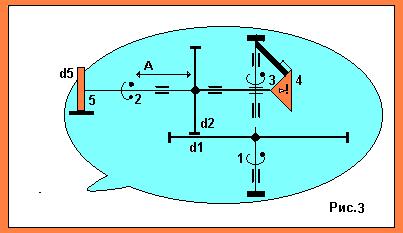
дополнение, так как почти ничего не изменилось. Появилось лишь колесо 5
с диаметром d5, посаженное на ось 2. Если дать ему опору и зацепление с
обкатываемой поверхностью, оно внесет не только ограничение в работу механизма,
но и позволит создать новое (дополнительное) управление. В чем оно, вероятно,
видно из схемы по рис.3.
Привод 4 и колесо 5 заставляют
весь механизм работать только в одном режиме: производить обкатку
по опоре с одновременным вращением вокруг оси 3. Колесо 2 "сидит" на оси
2 и вращается так же, как и колесо 5 (двигаясь вместе с осью и вдоль неё).
В этом "и зарыта собака".
Дело не в помогающем колесе
5, а в рабочем колесе 2. С его помощью (и с помощью представленного механизма)
можно создать те же условия и качества, что были показаны ранее во внутреннем
зацеплении.
Действительно, ось 2 позволяет
создать любые условия движения и вращения колеса 2. Если, например, диаметры
d2 и d5 не намного отличаются друг от друга, при обкатке колеса 5 по опоре
на полный оборот колесо 2 совершит тоже полный оборот. Поскольку угол поворота
оси 3 при этом будет определен, колесо 2, обкатываясь по диску, заставит
его повернуться на сектор, равный по дуге угла величине своей окружности
минус угол поворота оси 3. Если этот "минус" близок к величине окружности
колеса 2, поворот диска произойдет на очень малую величину. Таким образом,
внешнее зацепление даст возможность получить значительные передаточные
числа в одной ступени при близких контактных диаметрах.
При сдвиге колеса 2 влево
диск 1 получит ещё меньший угол поворота - вплоть до полной неподвижности,
хотя обкатка по нему колеса 2 идёт. Это значит, что поворот колеса 2 вокруг
оси 2 будет равен углу поворота оси 3 (если на оси 1 есть нагрузка). Сдвинув
немного колесо 2 в ту или иную сторону по оси 2, получим микровращение
диска и оси 1. Такой эффект по рис.1. был недостижим.
То же самое можно получить
при изменении соотношения диаметров колес d2 и d5.
Относительно схемы по рис.3
есть ещё многие другие особенности, здесь не показанные. Например, привод
может быть установлен по оси 3. Et al. И т. д. Таковы вкратце особенности.
Остальное требует более подробной разработки.
5. Модификации.
На рис.5 представлена более глубокая модификация, однако нужно придумать,
куда направить "хвост крокодила".
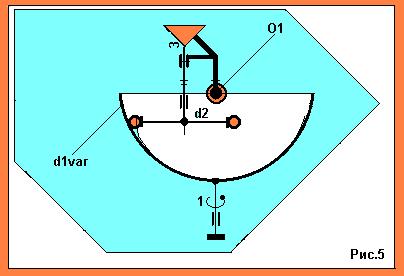
Сделать это не очень сложно.
Возможны другие качественно-количественные преобразования.
"Маленький крокодил" разросся, превратился и в большого, и в другие
варианты. Начинается их постепенное размножение.
Произойдет естественный отбор, исходя из реальных условий, поставленной
задачи и обозначенных схем.
В последующем возможен синтез передач внутреннего зацепления и настоящей
кинематики.
Если достаточно такого начального рассмотрения, желаю удачи в собственной
более подробной разработке!
Если не нравится, значит, есть другой вариант, - он на подходе.
[SUBSCRIBE list_author_mailto]
[SUBSCRIBE list_archive]
[SUBSCRIBE list_count]